




C/L/U ਕਿਸਮ ਦਾ ਡਿਊਲ ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ
ਤਕਨੀਕੀ ਮਾਪਦੰਡ
| ਸੀ-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ | L-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ | ਯੂ-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ | |||||||||||
| ਕ੍ਰਮ ਸੰਖਿਆ | ਪ੍ਰੋਜੈਕਟ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਯਾਦ ਰੱਖੋ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਯਾਦ ਰੱਖੋ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਪੈਰਾਮੀਟਰ | ਯਾਦ ਰੱਖੋ |
| 1 | ਰੇਟ ਕੀਤਾ ਲੋਡ | 200 ਕਿਲੋਗ੍ਰਾਮ |
500 ਕਿਲੋਗ੍ਰਾਮ | 1000 ਕਿਲੋਗ੍ਰਾਮ | ਦੂਜੇ ਧੁਰੇ ਦੇ R400mm/R400mm/R600mm ਘੇਰੇ ਦੇ ਅੰਦਰ | 500 ਕਿਲੋਗ੍ਰਾਮ | 1000 ਕਿਲੋਗ੍ਰਾਮ | 2000 ਕਿਲੋਗ੍ਰਾਮ | ਦੂਜੇ ਧੁਰੇ ਦੇ R400mm/R600mm/R800mm ਘੇਰੇ ਦੇ ਅੰਦਰ | 1000 ਕਿਲੋਗ੍ਰਾਮ | 3000 ਕਿਲੋਗ੍ਰਾਮ | 5000 ਕਿਲੋਗ੍ਰਾਮ | ਦੂਜੇ ਧੁਰੇ ਦੇ R600mm/R1500mm/R2000mm ਘੇਰੇ ਦੇ ਅੰਦਰ |
| 2 | ਗੀਰੇਸ਼ਨ ਦਾ ਮਿਆਰੀ ਘੇਰਾ | ਆਰ 400 ਮਿਲੀਮੀਟਰ | ਆਰ 400 ਮਿਲੀਮੀਟਰ | ਆਰ 600 ਮਿਲੀਮੀਟਰ |
| ਆਰ 400 ਮਿਲੀਮੀਟਰ | ਆਰ 600 ਮਿਲੀਮੀਟਰ | ਆਰ 800 ਮਿਲੀਮੀਟਰ |
| ਆਰ 600 ਮਿਲੀਮੀਟਰ | ਆਰ 1500 ਮਿਲੀਮੀਟਰ | ਆਰ2000 ਮਿਲੀਮੀਟਰ |
|
| 3 | ਪਹਿਲਾ ਧੁਰਾ ਫਲਿੱਪ ਕੋਣ | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | ਦੂਜੇ ਧੁਰੇ ਦਾ ਘੁੰਮਣ ਕੋਣ | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | ਪਹਿਲੇ ਧੁਰੇ ਦੀ ਰੇਟ ਕੀਤੀ ਉੱਪਰ ਵੱਲ ਗਤੀ | 50°/ਸੈ. | 50°/ਸੈ. | 15°/ਸੈ. |
| 50°/ਸੈ. | 50°/ਸੈ. | 17°/ਸੈ. |
| 17°/ਸੈ. | 17°/ਸੈ. | 17°/ਸੈ. |
|
| 6 | ਦੂਜੇ ਧੁਰੇ ਦੀ ਰੇਟ ਕੀਤੀ ਘੁੰਮਣ ਦੀ ਗਤੀ | 70°/ਸੈ. | 70°/ਸੈ. | 70°/ਸੈ. |
| 70°/ਸੈ. | 70°/ਸੈ. | 17°/ਸੈ. |
| 24°/ਸੈ. | 17°/ਸੈ. | 24°/ਸੈ. |
|
| 7 | ਪੁਜੀਸ਼ਨਿੰਗ ਸ਼ੁੱਧਤਾ ਦੁਹਰਾਓ | ±0.10 ਮਿਲੀਮੀਟਰ | ±0.15 ਮਿਲੀਮੀਟਰ | ±0.20 ਮਿਲੀਮੀਟਰ |
| ±0.10 ਮਿਲੀਮੀਟਰ | ±0.10 ਮਿਲੀਮੀਟਰ | 17°/ਸੈ. |
| ±0.15 ਮਿਲੀਮੀਟਰ | ±0.20 ਮਿਲੀਮੀਟਰ | ±0.25 ਮਿਲੀਮੀਟਰ |
|
| 8 | ਵਿਸਥਾਪਨ ਫਰੇਮ ਦਾ ਸੀਮਾ ਆਯਾਮ (ਲੰਬਾਈ × ਚੌੜਾਈ × ਉਚਾਈ) | 1200mm × 600mm × 70mm | 1600mm × 800mm × 90mm | 2000mm × 1200mm × 90mm |
| - | - | - |
| - | - | - |
|
| 9 | ਪੋਜੀਸ਼ਨ ਸ਼ਿਫਟਰ ਦਾ ਸਮੁੱਚਾ ਆਯਾਮ (ਲੰਬਾਈ × ਚੌੜਾਈ × ਉਚਾਈ) | 2000mm × 1100mm × 1700mm | 2300mm × 1200mm × 1900mm | 2700mm × 1500mm × 2200mm |
| 1500mm × 500mm × 850mm | 2000mm × 750mm × 1200mm | 2400mm × 900mm × 1600mm |
| 4200mm × 700mm × 1800mm | 5500mm × 900mm × 2200mm | 6500mm × 1200mm × 2600mm |
|
| 10 | ਮਿਆਰੀ ਦੋ-ਧੁਰੀ ਰੋਟਰੀ ਪਲੇਟ | - | - | - | - | Φ800mm | Φ1200mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000mm |
|
| 11 | ਪਹਿਲੇ ਧੁਰੇ ਦੇ ਘੁੰਮਣ ਦੀ ਕੇਂਦਰ ਉਚਾਈ
| 1200 ਮਿਲੀਮੀਟਰ | 1350 ਮਿਲੀਮੀਟਰ | 1600 ਮਿਲੀਮੀਟਰ |
| 550 ਮਿਲੀਮੀਟਰ | 800 ਮਿਲੀਮੀਟਰ | 1000 ਮਿਲੀਮੀਟਰ |
| 1500 ਮਿਲੀਮੀਟਰ | 1750 ਮਿਲੀਮੀਟਰ | 2200 ਮਿਲੀਮੀਟਰ |
|
| 12 | ਬਿਜਲੀ ਸਪਲਾਈ ਦੀਆਂ ਸਥਿਤੀਆਂ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਆਈਸੋਲੇਸ਼ਨ ਟ੍ਰਾਂਸਫਾਰਮਰ ਦੇ ਨਾਲ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਆਈਸੋਲੇਸ਼ਨ ਟ੍ਰਾਂਸਫਾਰਮਰ ਦੇ ਨਾਲ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਤਿੰਨ-ਪੜਾਅ 200V±10%50HZ | ਆਈਸੋਲੇਸ਼ਨ ਟ੍ਰਾਂਸਫਾਰਮਰ ਦੇ ਨਾਲ |
| 13 | ਇਨਸੂਲੇਸ਼ਨ ਕਲਾਸ | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ਉਪਕਰਣਾਂ ਦਾ ਕੁੱਲ ਭਾਰ | ਲਗਭਗ 800 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 1300 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 2000 ਕਿਲੋਗ੍ਰਾਮ |
| ਲਗਭਗ 900 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 1600 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 2500 ਕਿਲੋਗ੍ਰਾਮ |
| ਲਗਭਗ 2200 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 4000 ਕਿਲੋਗ੍ਰਾਮ | ਲਗਭਗ 6000 ਕਿਲੋਗ੍ਰਾਮ | |
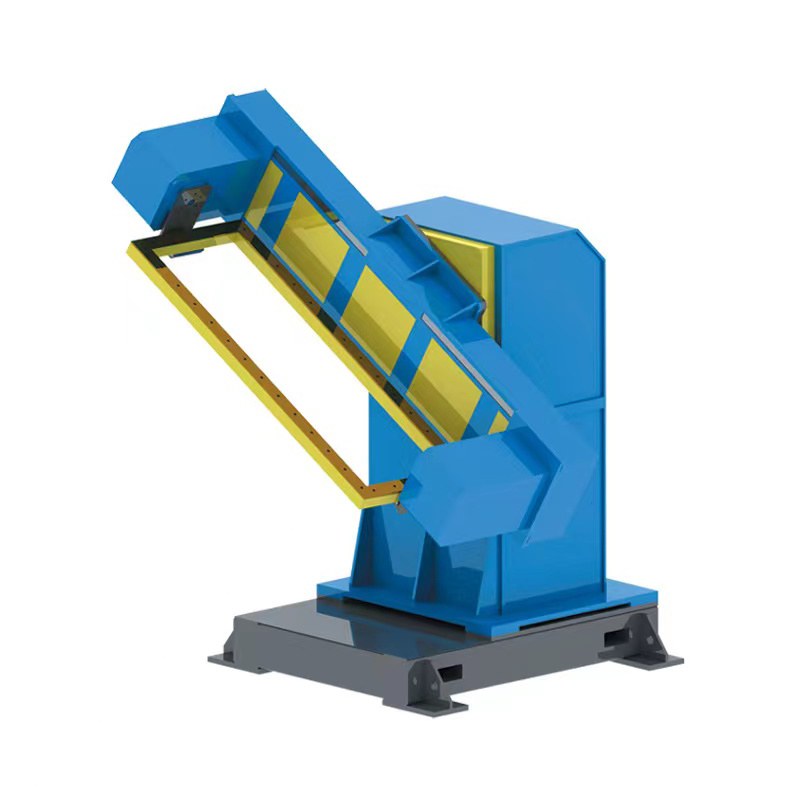
ਸੀ-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ
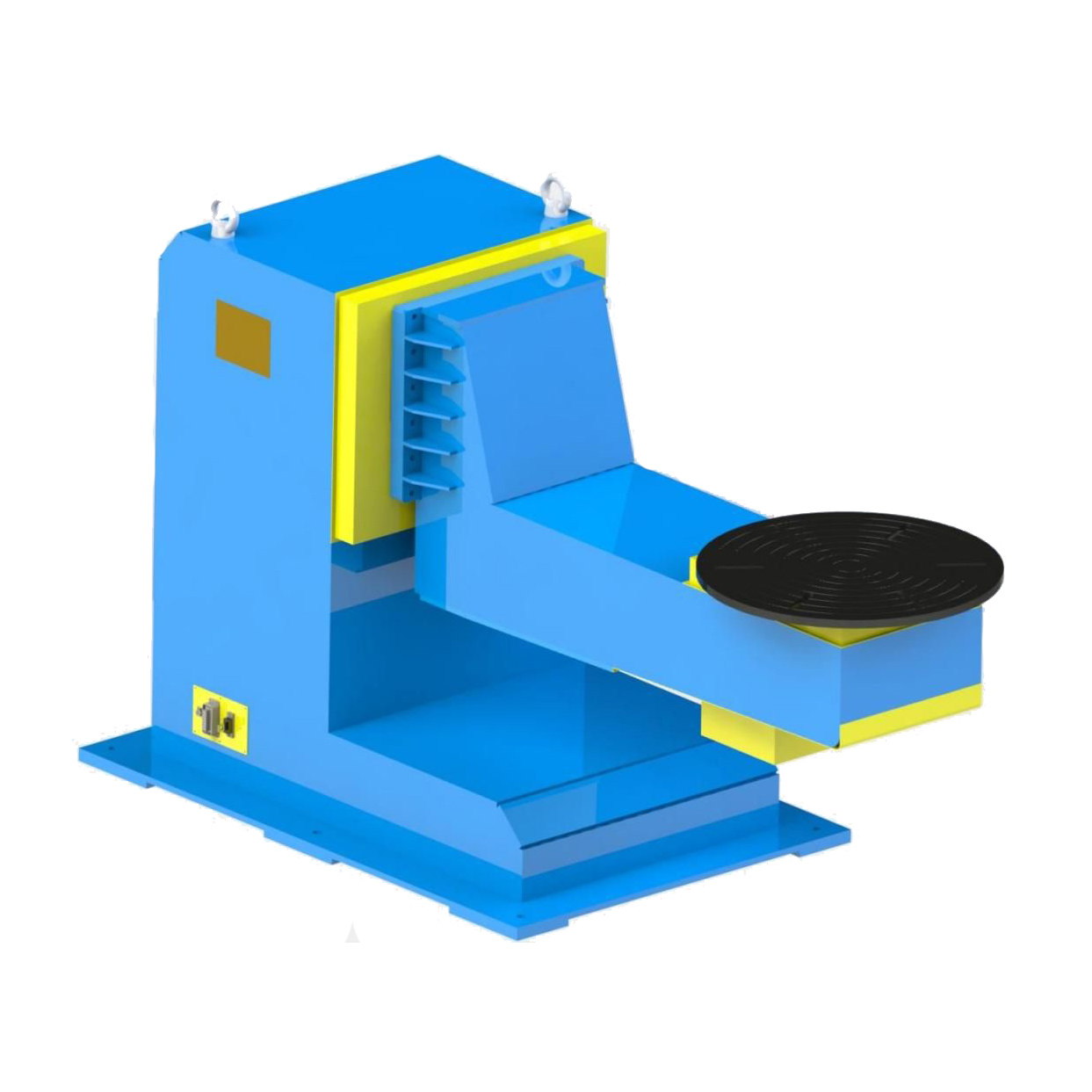
L-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ

ਯੂ-ਟਾਈਪ ਡਬਲ-ਐਕਸਿਸ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ
ਬਣਤਰ ਜਾਣ-ਪਛਾਣ
ਦੋਹਰਾ ਧੁਰਾ ਸਰਵੋ ਪੋਜੀਸ਼ਨਰ ਮੁੱਖ ਤੌਰ 'ਤੇ ਵੈਲਡਡ ਇੰਟੀਗਰਲ ਫਰੇਮ, ਵੈਲਡਿੰਗ ਡਿਸਪਲੇਸਮੈਂਟ ਫਰੇਮ, ਏਸੀ ਸਰਵੋ ਮੋਟਰ ਅਤੇ ਆਰਵੀ ਸ਼ੁੱਧਤਾ ਰੀਡਿਊਸਰ, ਰੋਟਰੀ ਸਪੋਰਟ, ਕੰਡਕਟਿਵ ਮਕੈਨਿਜ਼ਮ, ਪ੍ਰੋਟੈਕਟਿਵ ਸ਼ੀਲਡ ਅਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਕੰਟਰੋਲ ਸਿਸਟਮ ਤੋਂ ਬਣਿਆ ਹੁੰਦਾ ਹੈ। ਵੈਲਡਡ ਇੰਟੀਗਰਲ ਫਰੇਮ ਨੂੰ ਉੱਚ-ਗੁਣਵੱਤਾ ਵਾਲੇ ਪ੍ਰੋਫਾਈਲਾਂ ਨਾਲ ਵੈਲਡ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਐਨੀਲਿੰਗ ਅਤੇ ਤਣਾਅ ਤੋਂ ਰਾਹਤ ਪਾਉਣ ਤੋਂ ਬਾਅਦ, ਇਸਨੂੰ ਪੇਸ਼ੇਵਰ ਮਸ਼ੀਨਿੰਗ ਦੁਆਰਾ ਪ੍ਰੋਸੈਸ ਕੀਤਾ ਜਾਵੇਗਾ ਤਾਂ ਜੋ ਮੁੱਖ ਸਥਿਤੀਆਂ ਦੀ ਉੱਚ ਮਸ਼ੀਨਿੰਗ ਸ਼ੁੱਧਤਾ ਅਤੇ ਸ਼ੁੱਧਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ। ਸਤ੍ਹਾ 'ਤੇ ਐਂਟੀ-ਰਸਟ ਦਿੱਖ ਪੇਂਟ ਨਾਲ ਛਿੜਕਿਆ ਜਾਂਦਾ ਹੈ, ਜੋ ਕਿ ਸੁੰਦਰ ਅਤੇ ਉਦਾਰ ਹੈ, ਅਤੇ ਰੰਗ ਨੂੰ ਗਾਹਕ ਦੀਆਂ ਜ਼ਰੂਰਤਾਂ ਅਨੁਸਾਰ ਅਨੁਕੂਲਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਵੈਲਡ ਕੀਤੇ ਡਿਸਪਲੇਸਮੈਂਟ ਫਰੇਮ ਨੂੰ ਉੱਚ-ਗੁਣਵੱਤਾ ਵਾਲੇ ਪ੍ਰੋਫਾਈਲ ਸਟੀਲ ਨਾਲ ਵੈਲਡ ਅਤੇ ਮੋਲਡ ਕੀਤਾ ਜਾਵੇਗਾ ਅਤੇ ਪੇਸ਼ੇਵਰ ਮਸ਼ੀਨਿੰਗ ਦੁਆਰਾ ਪ੍ਰੋਸੈਸ ਕੀਤਾ ਜਾਵੇਗਾ। ਸਤ੍ਹਾ ਨੂੰ ਮਾਊਂਟਿੰਗ ਪੋਜੀਸ਼ਨਿੰਗ ਟੂਲਿੰਗ ਲਈ ਸਟੈਂਡਰਡ ਪੇਚ ਹੋਲ ਨਾਲ ਮਸ਼ੀਨ ਕੀਤਾ ਜਾਵੇਗਾ, ਅਤੇ ਪੇਂਟਿੰਗ ਅਤੇ ਕਾਲਾਪਨ ਅਤੇ ਜੰਗਾਲ ਰੋਕਥਾਮ ਇਲਾਜ ਕੀਤਾ ਜਾਵੇਗਾ।
ਰੋਟਰੀ ਪਲੇਟਫਾਰਮ ਪੇਸ਼ੇਵਰ ਮਕੈਨੀਕਲ ਪ੍ਰੋਸੈਸਿੰਗ ਤੋਂ ਬਾਅਦ ਉੱਚ-ਗੁਣਵੱਤਾ ਵਾਲੇ ਪ੍ਰੋਫਾਈਲ ਸਟੀਲ ਦੀ ਚੋਣ ਕਰਦਾ ਹੈ, ਅਤੇ ਸਤ੍ਹਾ ਨੂੰ ਮਾਊਂਟਿੰਗ ਪੋਜੀਸ਼ਨਿੰਗ ਟੂਲਿੰਗ ਲਈ ਸਟੈਂਡਰਡ ਪੇਚ ਹੋਲ ਨਾਲ ਮਸ਼ੀਨ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਕਾਲਾਪਨ ਅਤੇ ਜੰਗਾਲ ਰੋਕਥਾਮ ਇਲਾਜ ਕੀਤਾ ਜਾਵੇਗਾ।
ਏਸੀ ਸਰਵੋ ਮੋਟਰ ਅਤੇ ਆਰਵੀ ਰੀਡਿਊਸਰ ਨੂੰ ਪਾਵਰ ਮਕੈਨਿਜ਼ਮ ਵਜੋਂ ਚੁਣਨ ਨਾਲ ਰੋਟੇਸ਼ਨ ਦੀ ਸਥਿਰਤਾ, ਸਥਿਤੀ ਦੀ ਸ਼ੁੱਧਤਾ, ਲੰਬੀ ਟਿਕਾਊਤਾ ਅਤੇ ਘੱਟ ਅਸਫਲਤਾ ਦਰ ਯਕੀਨੀ ਬਣਾਈ ਜਾ ਸਕਦੀ ਹੈ। ਕੰਡਕਟਿਵ ਮਕੈਨਿਜ਼ਮ ਪਿੱਤਲ ਦਾ ਬਣਿਆ ਹੁੰਦਾ ਹੈ, ਜਿਸਦਾ ਵਧੀਆ ਕੰਡਕਟਿਵ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ। ਕੰਡਕਟਿਵ ਬੇਸ ਇੰਟੈਗਰਲ ਇਨਸੂਲੇਸ਼ਨ ਨੂੰ ਅਪਣਾਉਂਦਾ ਹੈ, ਜੋ ਸਰਵੋ ਮੋਟਰ, ਰੋਬੋਟ ਅਤੇ ਵੈਲਡਿੰਗ ਪਾਵਰ ਸਰੋਤ ਨੂੰ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਢੰਗ ਨਾਲ ਸੁਰੱਖਿਅਤ ਕਰ ਸਕਦਾ ਹੈ।
ਇਲੈਕਟ੍ਰਿਕ ਕੰਟਰੋਲ ਸਿਸਟਮ ਸਥਿਰ ਪ੍ਰਦਰਸ਼ਨ ਅਤੇ ਘੱਟ ਅਸਫਲਤਾ ਦਰ ਦੇ ਨਾਲ, ਪੋਜੀਸ਼ਨਰ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਜਾਪਾਨੀ ਓਮਰੋਨ ਪੀਐਲਸੀ ਨੂੰ ਅਪਣਾਉਂਦਾ ਹੈ। ਵਰਤੋਂ ਦੀ ਗੁਣਵੱਤਾ ਅਤੇ ਸਥਿਰਤਾ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਦੇਸ਼ ਅਤੇ ਵਿਦੇਸ਼ ਦੇ ਮਸ਼ਹੂਰ ਬ੍ਰਾਂਡਾਂ ਤੋਂ ਬਿਜਲੀ ਦੇ ਹਿੱਸੇ ਚੁਣੇ ਜਾਂਦੇ ਹਨ।











